
Rethinking event-based egocentric 3D human pose estimation. E-3DPSM models motion as a continuous event-driven state evolution, fusing delta and direct 3D human pose updates, thereby achieving real-time and temporally stable 3D reconstruction and significantly outperforming prior approaches.
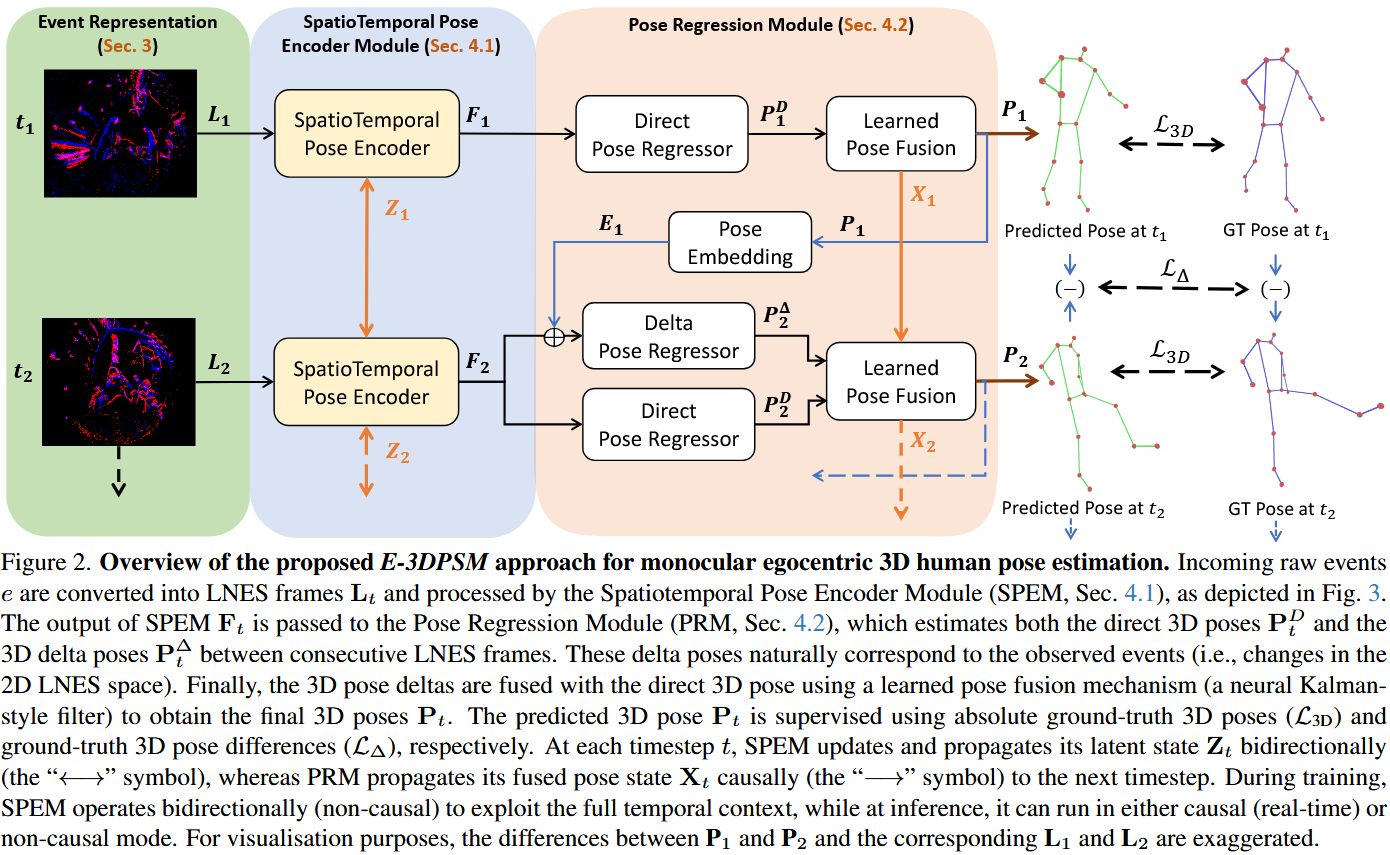
Event cameras offer multiple advantages in monocular egocentric 3D human pose estimation from head-mounted devices, such as millisecond temporal resolution, high dynamic range, and negligible motion blur. Existing methods effectively leverage these properties, but suffer from low 3D estimation accuracy, insufficient in many applications (e.g., immersive VR/AR). This is due to the design not being fully tailored towards event streams (e.g., their asynchronous and continuous nature), leading to high sensitivity to self-occlusions and temporal jitter in the estimates. This paper rethinks the setting and introduces E-3DPSM, an event-driven continuous pose state machine for event-based egocentric 3D human pose estimation. E-3DPSM aligns continuous human motion with fine-grained event dynamics; it evolves latent states and predicts continuous changes in 3D joint positions associated with observed events, which are fused with direct 3D human pose predictions, leading to stable and drift-free final 3D pose reconstructions. E-3DPSM runs in real-time at 80 Hz on a single workstation and sets a new state-of-the-art in experiments on two benchmarks, improving accuracy by up to 19% (MPJPE) and temporal stability by up to 2.7x.
Qualitative comparison with state-of-the-art methods on EE3D-R dataset. Actions: Crawl and Kick
Qualitative comparison with state-of-the-art methods on EE3D-R dataset. Actions: Walk and Object Interaction
Qualitative comparison with state-of-the-art methods on EE3D-W dataset. Actions: Walk and Pushup
Qualitative comparison with state-of-the-art methods on EE3D-W dataset. Actions: Crouch and Kick

Our head-mounted device setup. The device uses a single fisheye egocentric event camera for input, NVIDIA Jetson Orin Nano for onboard processing, and a portable power bank for standalone operation.
Scenario: Low light, lower body occlusion, and fast motion.
Scenario: Indoor walking and kicking.

Our method predicts smoother trajectories for occlusion-prone end-effector joints compared to existing approaches.

Comparison with state-of-the-art methods. E-3DPSM achieves significant improvements in accuracy (MPJPE) and temporal stability.


Per-Joint Evaluation. Comparison with state-of-the-art methods on EE3D-R and EE3D-W datasets.
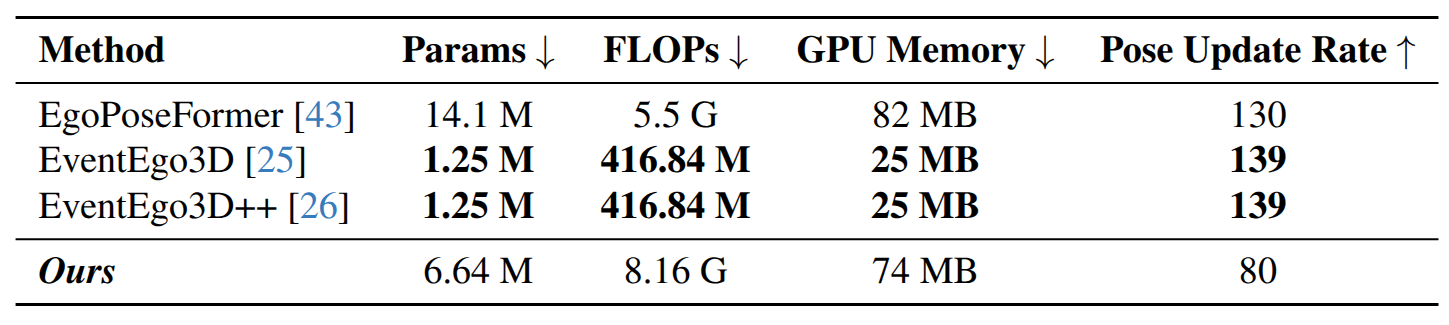
Model efficiency comparison in terms of parameters, FLOPs, GPU memory, and 3D pose update rate in Hz (measured on a single NVIDIA A6000 GPU).
@inproceedings{deshmukh2026e3dpsm,
title = {E-3DPSM: A State Machine for Event-based Egocentric 3D Human Pose Estimation},
author = {Deshmukh, Mayur and Akada, Hiroyasu and Rhodin, Helge and Theobalt, Christian and Golyanik, Vladislav},
booktitle = {Computer Vision and Pattern Recognition (CVPR)},
year = {2026}
}
This work was partially supported by the Nakajima Foundation scholarship.